Developmental Robotics for Embodied Language Learning
by Angelo Cangelosi
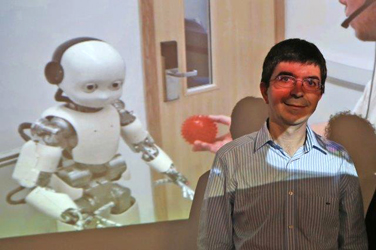
Growing theoretical and experimental research on action and language processing and on number learning and gestures clearly demonstrates the role of embodiment in cognition and language processing. In psychology and neuroscience this evidence constitutes the basis of embodied cognition, also known as grounded cognition (Pezzulo et al. 2012; Borghi & Cangelosi 2014). In robotics, these studies have important implications for the design of linguistic capabilities in cognitive agents and robots for human-robot communication, and have led to the new interdisciplinary approach of Developmental Robotics (Cangelosi & Schlesinger 2015). During the talk we will present examples of developmental robotics models and experimental results from iCub experiments on the embodiment biases in early word acquisition and grammar learning (Morse et al. 2015), experiment on the pointing and finger counting in number learning (De La Cruz et al. 2014) and on mental imagery and rotation (Seepanomwan et al. 2015). The presentation will also discuss the implications for the symbol grounding problem (Cangelosi, 2012) and how embodied robots can help addressing the issue of embodied cognition and the grounding of symbol manipulation use on sensorimotor intelligence.
- Cangelosi A, Schlesinger M (2015). Developmental Robotics: From Babies to Robots. Cambridge, MA: MIT Press.
- Cangelosi A. (2012). Solutions and open challenges for the symbol grounding problem. International Journal of Signs and Semiotic Systems, 1(1), 49-54 (with commentaries)
- De La Cruz V., Di Nuovo A., Cangelosi A., Di Nuovo S. (2014). Making fingers and words count in a cognitive robot. Frontiers in Behavioral Neuroscience, 8, 13 10.3389/fnbeh.2014.00013
- Morse A., Belpaeme T, Smith L, Cangelosi A. (2015). Posture affects how robots and infants map words to objects PLoS ONE, 10(3) 10.1371/journal.pone.0116012
- Borghi A.M., Cangelosi A. (2014). Action and language integration: From humans to cognitive robots. Topics in Cognitive Science, 6, 344–358. 10.1111/tops.12103
- Pezzulo G., Barsalou L.W., Cangelosi A., Fischer M.H., McRae K., Spivey M. (2013). Computational grounded cognition: A new alliance between grounded cognition and computational modelling. Frontiers in Psychology, 6(612), 1-11. doi:10.3389/fpsyg.2012.00612
- Seepanomwan K., Caligiore D., Cangelosi A., Baldassarre G. (2015). Generalization, decision making, and embodiment effects in mental rotation: A neurorobotic architecture tested with a humanoid robot. Neural Networks, 7:31-47 doi:10.1016/j.neunet.2015.09.010
 Angelo Cangelosi is Professor of Artificial Intelligence and Cognition and the Director of the Centre for Robotics and Neural Systems at Plymouth University (UK). Cangelosi studied psychology and cognitive science at the Universities of Rome La Sapienza and at the University of Genoa, and was visiting scholar at the University of California San Diego and the University of Southampton. Cangelosi’s main research expertise is on language grounding and embodiment in humanoid robots, developmental robotics, human-robot interaction, and on the application of neuromorphic systems for robot learning. He currently is the coordinator of the UK EPSRC project “BABEL: Bio-inspired Architecture for Brain Embodied Language” (2012-2016) and of the EU H2020 Marie Skłodowska-Curie European Industrial Doctorate “APRIL: Applications of Personal Robotics through Interaction and Learning” (2016-2019). He also is Principal investigator for the ongoing projects “THRIVE” (US Air Force Office of Science and Research, 2014-1018), the FP7 projects POETICON++ and ROBOT-ERA, and the Marie Curie projects SECURE, DCOMM, ORATOR and DECORO. He was coordinator of the ITALK Integrating project and the RobotDoc ITN. Overall, he has secured over £15m of research grants as coordinator/PI. Cangelosi has produced more than 250 scientific publications, and has chaired numerous workshops and conferences including the IEEE ICDL-EpiRob 2011 and 2013 Conferences (Frankfurt 2011, Osaka 2013). In 2012-13 he was Chair of the IEEE Technical Committee on Autonomous Mental Development. Cangelosi is Editor (with K. Dautenhahn) of the journal Interaction Studies, and in 2015 was Editor-in-Chief of IEEE Transactions on Autonomous Development. His latest book “Developmental Robotics: From Babies to Robots” (MIT Press; co-authored with Matt Schlesinger) was published in January 2015.
Angelo Cangelosi is Professor of Artificial Intelligence and Cognition and the Director of the Centre for Robotics and Neural Systems at Plymouth University (UK). Cangelosi studied psychology and cognitive science at the Universities of Rome La Sapienza and at the University of Genoa, and was visiting scholar at the University of California San Diego and the University of Southampton. Cangelosi’s main research expertise is on language grounding and embodiment in humanoid robots, developmental robotics, human-robot interaction, and on the application of neuromorphic systems for robot learning. He currently is the coordinator of the UK EPSRC project “BABEL: Bio-inspired Architecture for Brain Embodied Language” (2012-2016) and of the EU H2020 Marie Skłodowska-Curie European Industrial Doctorate “APRIL: Applications of Personal Robotics through Interaction and Learning” (2016-2019). He also is Principal investigator for the ongoing projects “THRIVE” (US Air Force Office of Science and Research, 2014-1018), the FP7 projects POETICON++ and ROBOT-ERA, and the Marie Curie projects SECURE, DCOMM, ORATOR and DECORO. He was coordinator of the ITALK Integrating project and the RobotDoc ITN. Overall, he has secured over £15m of research grants as coordinator/PI. Cangelosi has produced more than 250 scientific publications, and has chaired numerous workshops and conferences including the IEEE ICDL-EpiRob 2011 and 2013 Conferences (Frankfurt 2011, Osaka 2013). In 2012-13 he was Chair of the IEEE Technical Committee on Autonomous Mental Development. Cangelosi is Editor (with K. Dautenhahn) of the journal Interaction Studies, and in 2015 was Editor-in-Chief of IEEE Transactions on Autonomous Development. His latest book “Developmental Robotics: From Babies to Robots” (MIT Press; co-authored with Matt Schlesinger) was published in January 2015.
You can download the full presentation file (pdf) from here
On the understandability of rule learning
by Johannes Fürnkranz
One of the standard arguments in favor of inductive rule learning algorithms is that the rules that they learn are understandable. In this talk, we will question this assumption, in particular with respect to commonly used rule learning heuristics that aim at learning rules that are as simple as possible. We will, in contrary, argue that in many cases, short rules are not what is desirable from the point of view of understandability. To that end, we will show propose that criteria for evaluating rule refinements should be inverted, in the sense that their greedy rule refinement process should not aim for covering positive examples but for excluding negative examples. We motivate this choice by examples, and show that a suitably adapted rule learning algorithm outperforms its original counter-part on a large set of benchmark problems. Interestingly, it turns out that rules learned with such inverted heuristics tend to be much longer, yet not more specific than rules learned with conventional rules, which makes this technique particularly interesting for subgroup discovery. We also relate this technique to the learning of characteristic rules, to formal concept analysis, and the mining of closed itemsets.
 Johannes Fürnkranz is Professor for Knowledge Engineering at TU Darmstadt. He has studied at the Technical University Vienna, the University of Chicago, and at Carnegie Mellon University. His research interests are in machine learning and data mining, in particular in preference learning, rule learning, multi-label classification, and their applications to game playing, web mining, and the social sciences. He is a frequent member of program committees of relevant conferences, was co-chair of ECML/PKDD 2006, ICML 2010, and Discovery Science 2013, and serves as an action editor of “Machine Learning” and the editor-in-chief of the journal “Data Mining and Knowledge Discovery”.
Johannes Fürnkranz is Professor for Knowledge Engineering at TU Darmstadt. He has studied at the Technical University Vienna, the University of Chicago, and at Carnegie Mellon University. His research interests are in machine learning and data mining, in particular in preference learning, rule learning, multi-label classification, and their applications to game playing, web mining, and the social sciences. He is a frequent member of program committees of relevant conferences, was co-chair of ECML/PKDD 2006, ICML 2010, and Discovery Science 2013, and serves as an action editor of “Machine Learning” and the editor-in-chief of the journal “Data Mining and Knowledge Discovery”.
You can download the full presentation file (pdf) from here
Tutorials
Cooperative Games in Multiagent Systems
Geor gios Chalkiadakis is an Associate Professor at the School of Electronic and Computer Engineering, Technical University of Crete (TUC). Before joining TUC in 2011, he was a Research Fellow at the School of Electronics and Computer Science, University of Southampton, UK. His research interests primarily lie in the areas of multiagent systems, Bayesian reasoning and learning, decision making under uncertainty, algorithmic game theory, and intelligent agent technologies for the Smart Grid. His PhD thesis (University of Toronto, 2007) was a finalist for the IFAAMAS-2007 Victor Lesser Distinguished Dissertation Award. Georgios is a co-author of the much-cited, graduate-level textbook “Computational Aspects of Cooperative Game Theory” (Morgan & Claypool Publishers, 2011). His published work has received several best paper awards and best paper award nominations in major international conferences. He currently serves as an editorial board member of the Journal of Artificial Intelligence Research (JAIR); and as the elected General Secretary of the Hellenic Artificial Intelligence Society (EETN). Moreover, he has served as a senior program committee and program committee member at several top international conferences, and as a reviewer for several top journals in his areas of expertise; and has co-organized and co-chaired several international scientific workshops and summer schools. More details on Georgios’ research can be found at http://www.intelligence.tuc.gr/~gehalk .
gios Chalkiadakis is an Associate Professor at the School of Electronic and Computer Engineering, Technical University of Crete (TUC). Before joining TUC in 2011, he was a Research Fellow at the School of Electronics and Computer Science, University of Southampton, UK. His research interests primarily lie in the areas of multiagent systems, Bayesian reasoning and learning, decision making under uncertainty, algorithmic game theory, and intelligent agent technologies for the Smart Grid. His PhD thesis (University of Toronto, 2007) was a finalist for the IFAAMAS-2007 Victor Lesser Distinguished Dissertation Award. Georgios is a co-author of the much-cited, graduate-level textbook “Computational Aspects of Cooperative Game Theory” (Morgan & Claypool Publishers, 2011). His published work has received several best paper awards and best paper award nominations in major international conferences. He currently serves as an editorial board member of the Journal of Artificial Intelligence Research (JAIR); and as the elected General Secretary of the Hellenic Artificial Intelligence Society (EETN). Moreover, he has served as a senior program committee and program committee member at several top international conferences, and as a reviewer for several top journals in his areas of expertise; and has co-organized and co-chaired several international scientific workshops and summer schools. More details on Georgios’ research can be found at http://www.intelligence.tuc.gr/~gehalk .
You can download the full presentation file (pdf) from here




{kind=link}